




优傲3机器人的运动学模型
时间:2017-11-27
阅读:12164

优傲3机器人的运动学模型
经过前面章节的叙述,我们可以由机器人视觉系统获取得到焊接路径的图像,经过处理后最终得到焊接路径的位置信息。本章要解决的问题是根据焊接路径的位置信息,控制机器人实现自动焊接作业,同时需要对焊接过程进行轨迹规划,使焊枪中心能平稳地进行焊接。
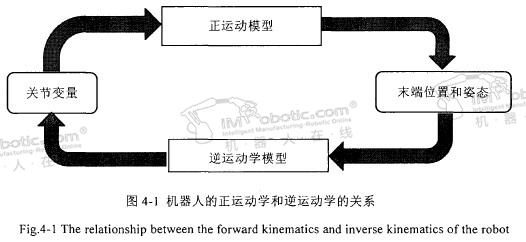
机器人运动学模型是控制其实现预期运动的基础,机器人运动学通常分为两类:机器人的正运动学和机器人的逆运动学。机器人的正运动学就是己知机器人各杆件的结构几何参数和各运动副的运动矢量,求机器人末端执行器相对于参考坐标系的位置和姿态。而机器人的逆运动学就是,己知机器人末端执行器相对于基座标系的位置和姿态,给出机器人各个杆件的几何结构参数,求解各运动副的运动矢量。正运动学和逆运动学的关系可以用图4-1来表示。
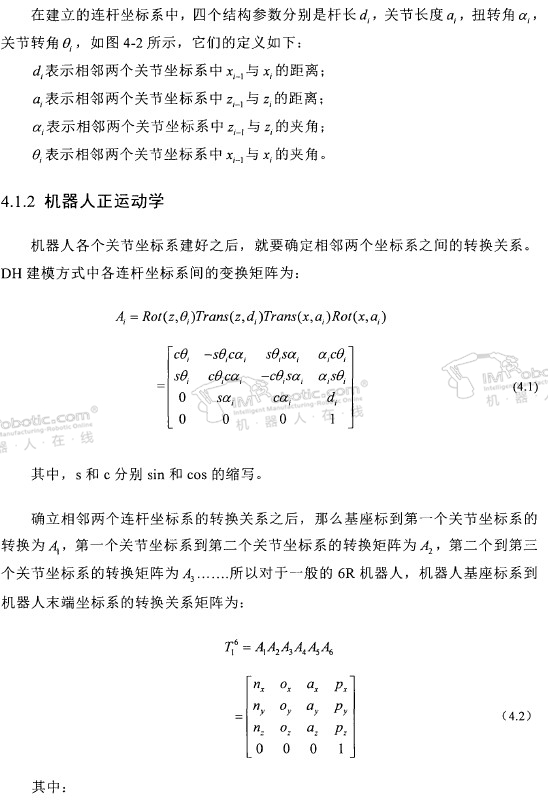
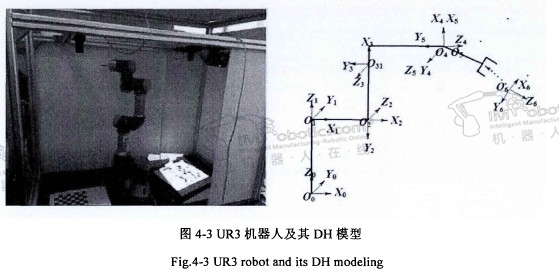
机器人运动建模方式有D-H建模和基于旋量的建模方式,其中最常用的是由Denavit和Hartenberg提出的D-H建模方式,本文也是利用D-H建模方式建立相邻两个连杆坐标系的转换关系,最后得到机器人末端执行器相对于基坐标系的位姿。
DH模型
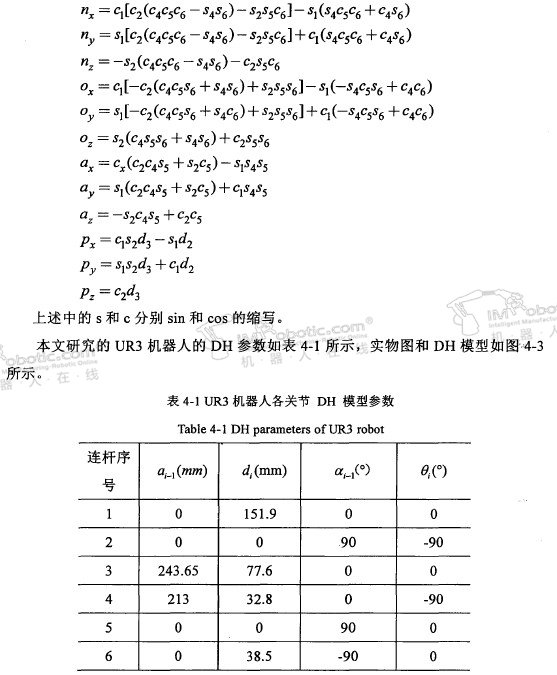
机器人运动学参数之间的函数关系[}so}。一旦确定了机器人末端位姿与机器人运动学参数之间的函数关系,就可以通过改变机器人的运动学模型的内部参数来控制机器人在工作空间内的运动。
1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来这篇论文里的机器人建模方法被称为DH模型。
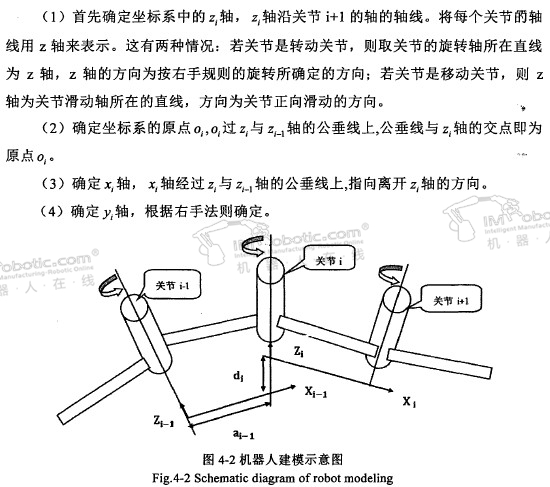
DH建模方法优点在于其非常简单且通用性非常好,可对任何构型的机器人的连杆和关节进行建模,因此DH模型是现在最常用的机器人建模方式。DH模型描述的是:在机器人的各个关节上建立关节坐标系,然后确定相邻两个关节坐标系的转换方法,其中确定四个与坐标转换有关的机器人运动学参数,由这四个运动学参数确定相邻两个坐标系的变换矩阵。关节坐标系的建立方法和步骤如下:
机器人的逆运动学
机器人的逆运动学就是己知机器人末端执行器的位姿,求解各关机的转角。机器人的逆解有着广泛的应用,在机器人的路径规划和轨迹控制中,机器人的逆解是控制的关键。
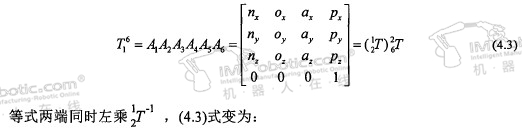
工业机器人求逆解的方法可分为两种:数值求解和封闭解阴。在六自由度的机器人中,解其方程通常可以得到数值解,在一些特殊的情况可以得到其封闭解。由于封闭解比数值解法计算速度更快,效率更高,便于实时控制,因而常常求解其运动学封闭解。封闭解又可以分为两类:解析法和几何法。对于一般的的6R机器人,常用求逆解的方法包括解析法和几何法两种,解析法由于计算简单,适用性强而被广泛采用,本文也是采用解析法对UR3机器人进行求逆解。解析法求逆解的具体过程如下:
对于式(4.2 ),可以写成:


其他角的求解过程也类似,这里不再详述。需要注意的是最后得到八组逆解,需要通过机器人的工作空间等约束选取最符合要求的一组解作为机器人当前位姿的逆解。
逆解在整个视觉控制中起着非常重要的作用,经过前面的章节分析,得到焊接路径中心线在机器人基座标系下的坐标,通过逆解求解各关节的转角,以控制机器人实现预期的动作。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









