




焊接机器人自主示教的系统组成
时间:2017-11-27
阅读:7041

焊接机器人自主示教的系统组成
1 自主示教系统的硬件组成
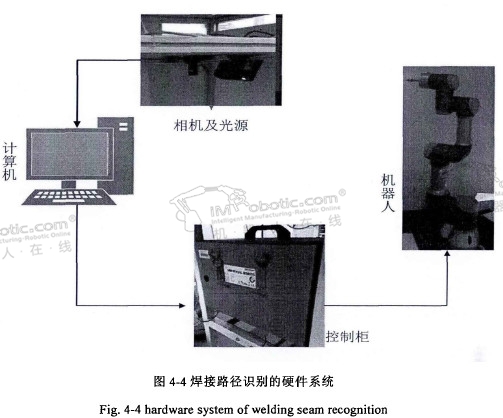
本课题搭建视觉控制系统主要由UR3工业机器人,CCD工业摄像机、PC机等组成,工业机器人视觉伺服控制系统如图4-4所示:
UR3机器人是Universal Robots公司研发的一台轻型柔性工业机器人,UR3自重11kg,负重3kg,重复定位定都为0.01 mm。所有腕关节均可360度旋转,而末端关节可作无限旋转。这些独特的功能使得UR3成为现今市场上最灵活轻便、并咀可与工人一起肩并肩工作的台式机器人。传统的工业机器人需要通过示教或者离线编程的方式进行编程,而UR3机器人最大的特点是可以通过“触角”进行编程,通过感应外部力的方向来确定机器人的运动方向,这大大降低了示教编程的难度。UR3机器人有开放的通讯接口,通过以太网通讯能实现外部计算机与机器人控制器的通讯。本文采集到的焊接路径图像经过图像处理后得到的特征信息,通过TCP/IP协议,
实现计算机与控制器的数据传输,达到控制机器人实现自主示教的目的。
本文采用的CCD摄像机为深圳显微科技生产的型号为D-CFS500-H1的高清工业相机,有效像素为1280H× 1024V,扫描速度是30fps,可通过手动调整相机的光圈和焦距。
2自主示教系统的软件介绍
控制机器人准确地进行自动焊接的前提是机器人与计算机进行数据交换。视觉信息经过处理后得到的控制信息传到机器人控制器里,驱动机器人进行预期作业。这个过程叫做通讯。而接口是计算机实现与外部通讯的桥梁,常见的计算机接口有串行接口、并行接口、USB接口、磁盘接口。本文是基于OpenCV和vs2013软件进行编程,OpenCV是由Intel公司开源的计算机视觉类代码,用于实现常用的图像处理与视觉算法,利用该代码源能大大地减少视觉开发过程的工作量,缩短开发周期,避免在一些基础的应用中花费过多的时间,本文使用OpenCV编写读取图像数据的代码并对图像进行处理,提取出来底层控制信息,进行焊接路径图像的处理,得到其基本特征信息,将从图像中得到的有关机器人和目标的特征转化为控制量,通过TCP/IP通信传递给机器人控制器,从而控制机器人的进行预期的作业。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









