




焊接机器人自主示教的实现
时间:2017-11-27
阅读:9820

焊接机器人自主示教的实现
1963年Wichman首次提出用视频流作为输入控制信息控制机器人运动,虽然他没有给出相关的实验,但后来这一思想被认为是视觉控制的雏形。经过几十年的发展,视觉控制己经发展的比较成熟了,目前基于位置的视觉控制从控制方式上看,可以分为开环控制和闭环控制,开环控制中视觉信息处理和机器人的运动是独立分开的两个串行的任务,而闭环控制是利用视觉信息反馈控制机器人,以视觉反馈引导机器人。它们都有各自的优点和缺点,开环控制的精度难以控制,且对先验知识依赖度高,闭环控制克服了开环的缺点,但是要求机器人末端操作器始终可以在视觉场景中观测到。
1控制原理
由前面的分析知,焊接路径相对于摄像机坐标系下的位姿可以通过焊接路径的图像特征信息求得,机器人的当前位姿可以通过机器人的正运动学求得,摄像机坐标系到机器人基坐标系的转换可以通过手眼关系求解,因此可以得到焊缝相对于机器人基座标系的位姿。
构造机器人运动学误差函数,设位姿E是机器人期望位姿与机器人当前位姿之差。摄像机采集到焊接路径图像后经过图像处理,得到与所构造的误差函数有关的参数,通过某种控制算法将误差函数的值收敛到最终为零。
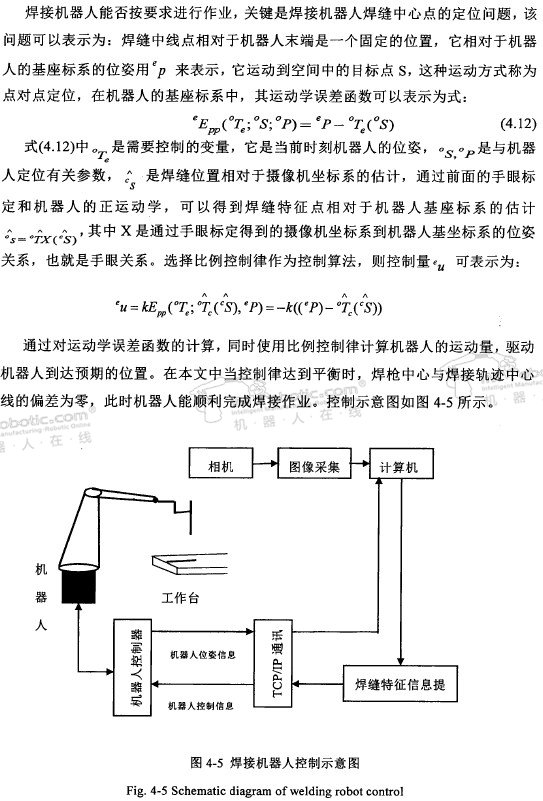
2计算机与机器人控制器的通讯
计算机对采集的焊缝图像进行处理之后得到的数据信息要传输到机器人控制器中,这个过程需要通过通讯来完成。图像处理完毕后得到焊缝中心与机器人焊枪中心位置的偏差,然后由控制系统基于编程发出控制指令,让作为执行机构的机器人完成预期的焊接任务。本文实验使用的UR3机器人提供了基于TCP/IP协议的接口,因此,本文用TCP/IP协议实现机器人与机器人控制器的通讯。
TCP/IP协议源于1969年,是针对Internet开发的一种体系结构和协议标准,目的在于解决异种计算机网络的通信问题。使得网络在互联时能为用户提供一种通用、一致的通信服务。是Internet采用的协议标准。基于TCP/IP的通讯具有成本低、可靠性高、实用性强、性能高等特点,所以现在许多工业自动化产品都具有基于TCP/IP协议通讯的接口,从而实现设备与设备之间,设备与网络之间的通讯。UR机器人在TCP/IP协议的基础上,提供了丰富的接口用于与外部设备的交互。 UR3机器人TCP/IP接口如表4-2所示:
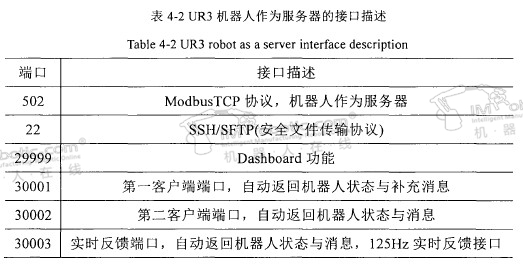
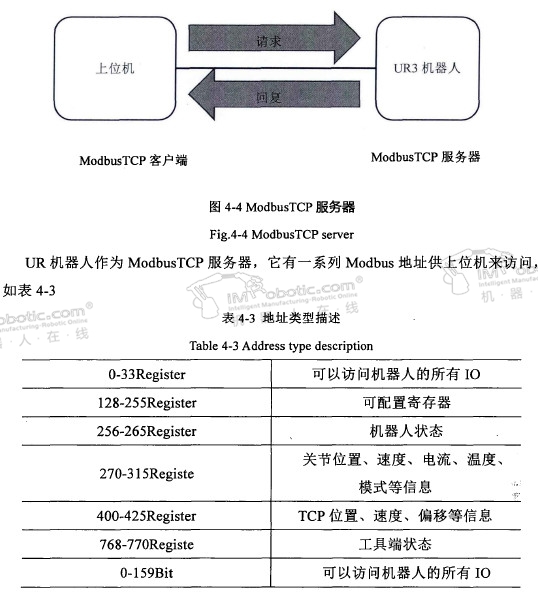
通过这些接口,作为上位机的计算机就可以实现远程控制优傲机器人UR3机器人,在通讯的过程中,机器人作为ModbusTCP的服务器,设置机器人的IP与计算机的IP处于同一网段,通过IP地址和端口号为29999的Dashboard端口连接机器人,上位机可以通过29999端口直接发送一些简单的指令给机器人,这些指令是UR自己定义的,这种功能被称为Dashboard o UR机器人既可以作为ModbusTCP服务器,也可以作为ModbusTCP客户端,示意图如下:
另外基于利用UR3机器人开放的基于TCP/IP的协议端口,还可以制作自己的Polyscope软件,实现上位机的远程控制。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









