





焊接机器人视觉识别系统轨迹规划
时间:2017-11-27
阅读:8338

焊接机器人视觉识别系统轨迹规划
经过图像处理后,得到焊接路径,在进行焊接作业之前,需要对焊接路径进行轨迹规划,对焊接机器人进行轨迹规划的主要任务是确保焊枪中心能沿着焊接路径平稳地进行焊接作业,同时确保焊枪的位姿符合焊接工艺的要求。对于一些复杂的曲线焊缝和折现焊缝,通过图像处理后得到的焊接路径中心线的数据点信息往往不是光滑的线段,为了避免在过渡处出现剧烈的振动和冲击,需要使焊枪的位移、速度和加速度保持连续,这就需要提前对焊枪中心进行轨迹规划。
通常,对机器人的作业过程的要求是高效、平稳、降低能耗等。而轨迹优化的目标主要是:提高焊接效率,减少能力的消耗,使焊接机器人能更好更快地完成焊接任务;减小在过度处的加速度冲击,是机器人轨迹优化的令一个重要目的,通过此举减少过渡事对关节力矩的冲击,提高机器人使用寿命。
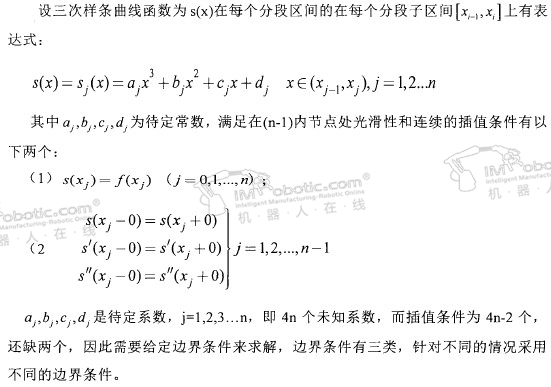
机器人常使用插值的方法进行轨迹规划,在实际的焊接中,焊接路径可能由多段复杂的曲线组成,而最小二乘法只能对直线焊缝和比较简单的曲线焊缝进行轨迹规划,为了对较复杂的焊接路径进行规划,需要选取更适合的曲轨迹线规划方法。三次样条插值方法计算简单,同时很好地满足二阶连续,保证过渡处的加速度平稳,因此是本文采用三次样条插值对焊接机器人进行轨迹,具体的过程如下:
本章根据焊接机器人视觉控制的原理,首先对UR3机器人进行运动学建模,对其进行正运动学和逆运动学分析。介绍了运动学误差函数,选择比例控制律作为控制算法,为后续实现对焊枪中心的纠偏奠定理论基础。基于TCP/IP通讯方式实现机器人与机器人控制器间的通讯。最后针对焊接过程可能存在不平稳等问题提出了轨迹规划算法。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









