





abb机器人编程指令——轨迹偏移使用的指令以及moveL指令

ABB机器人是四大家族中的一个机器人品牌,它以诸多的优势得到了各行各业的认可,现在的工业生产中abb机器人使用的数量居多,大家知道abb机器人编程指令——轨迹偏移使用的指令吗?大家现在就跟小编来看一下相关的介绍吧。

abb机器人编程指令——轨迹偏移使用的指令:
1、如果有两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)
2、完成右边轨迹示教Path_30,起点为Target_20。
3、完成左边起点的示教,为Target_ref_start。
注:如果左边产品轨迹有旋转,示教的Target_ref_start相对于左边产品的姿态要和Target_20相对于右边产品的姿态一致,此处左边产品旋转了30°,示教的角度z方向也旋转了30°
4单工位多次预约程序
机器人在home等待。有人按过di信号,机器人开始执行。人工可以一次性多次预约,即如果人工一次性按过3次,机器人执行三次
5、我们通过中断来实现。
6、中断的意义为,机器人后台在不断扫描(类似PLC),和机器人前台运动不冲突。后台实时扫描到信号就会去执行设定的中断程序,中断程序里没有运动指令,前台机器人不停,不影响运动。
接下来是对ABB机器人moveL指令的讲解。
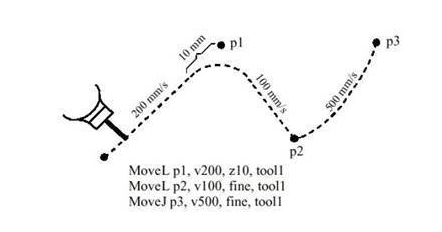
机器人以线性移动方式运动至目标点,当前点与目标点两点确定一条直线,机器人运动状态可控,运动路径保持唯一,可能出现奇点,常用于机器人在工作状态移动。
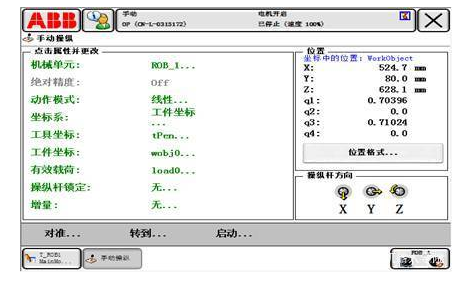
① 在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标和工件坐标。
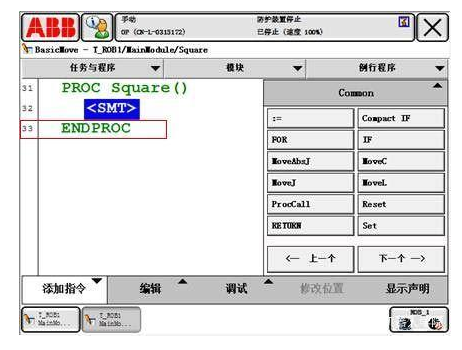
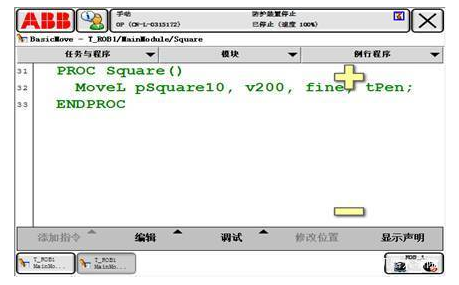
② 选中要添加指令的位置。

③ 单击添加指令选择MoveL。
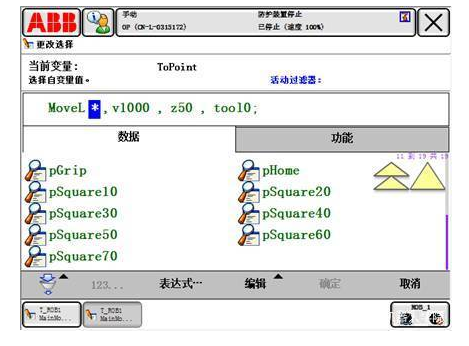
④ 双击目标位置*,将弹出的更改选择窗口。
⑤ 在数据列表中选择已存在的目标点。
⑥ 如果列表中没有目标点,可以点击 新建 来新建一个程序数据。

⑦ 然后点击 确定 完成。
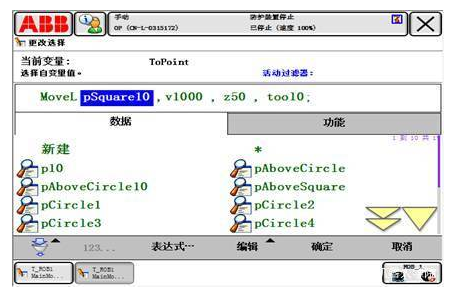
⑧ 重复步骤3-6,可以更改其他参数。
Eg:
以上就是小编为大家带来的关于abb机器人编程指令——轨迹偏移使用的指令以及moveL指令的介绍,大家现在了解了吧,希望能给大家带来帮助。机器人现在被很多的企业所认可,相信在不久的将来,机器人技术会得到越来越广泛的使用,多了解一些知识总归是没错的。

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-12-25 00:00:00
- 2022-11-15 16:25:55
- 2022-10-19 21:03:40
- 2022-10-26 17:23:27
- 2022-08-03 10:20:40
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









