





【ABB】ABB机器人加速度和最大速度设置
时间:2019-11-13
阅读:147595

一、ABB机器人加速度的设置
ABB机器人RAPID中可以通过以下三种方式修改机器人加速度。
1. AccSet 50,50 表示机器人的加速度和加加速度(包括减速度和减减速度)均设置为50%
2. WorldAccLim On := 3.5;表示当前机器人的加速度和减速度最大值为3.5m/s2
WorldAccLim Off;表示当前机器人加速度恢复为默认
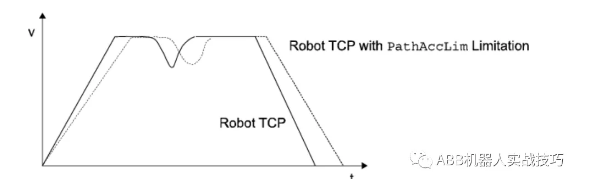
3. PathAccLim TRUE AccMax := 4, TRUE DecelMax := 3;表示当前机器人的加速度最大为4m/s2,减速度最大为3m/s2
PathAccLim TRUE AccMax := 4, FALSE;表示加速度最大为4m/s2,减速度默认
下图为使用加速度限制后,机器人加速时间变长,减速时间变长
二、ABB机器人理论最大速度
不同型号机器人理论最大直线速度不一。在使用运动语句时,可以直接使用vmax来使得机器人尽量达到该机器人能达到的最大速度。
MoveL p10,vmax,fine,tool0\WObj:=wobj1;
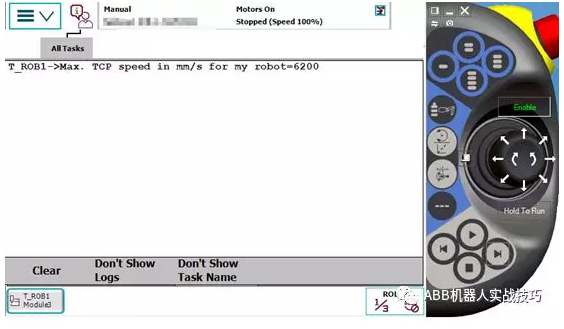
如何获取该机器人的理论最大直线速度?可以使用函数MaxRobSpeed()来获取。
在示教器插入如下代码,即可写屏显示机器人最大速度,如上图
TPWrite "Max. TCP speed in mm/s for myrobot="\Num:=MaxRobSpeed();
ABB
速度
技术干货

好的文章,需要您的鼓励
26

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐
上海ABB工程有限公司
 6年
6年



相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-12-18 16:23:04
- 2023-04-04 11:04:05
- 2022-10-26 07:15:04
- 2022-12-18 08:14:11
- 2022-11-02 13:11:25
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









