





安川机器人报错代码:操作目的和设定第二原点位置的方法
时间:2020-10-27
阅读:18901

6.4.1 操作目的
当接通电源时,如绝对编码器的位置数据与上一次关断电源时的位置数据不同时,会出现报警信息。
以下两种情况会发生故障:
• PG 系统发生异常。
• PG 系统正常,但关闭电源后,机器人本体发生了位移。 .
如 PG 系统发生异常,按启动按扭,开始再现时,机器人有向不可预测方向运动的危险性。
为了确保安全,出现绝对原点数据准许范围异常报警后,如不进行位置确认的操作,就不能进行再现及试运行操作。
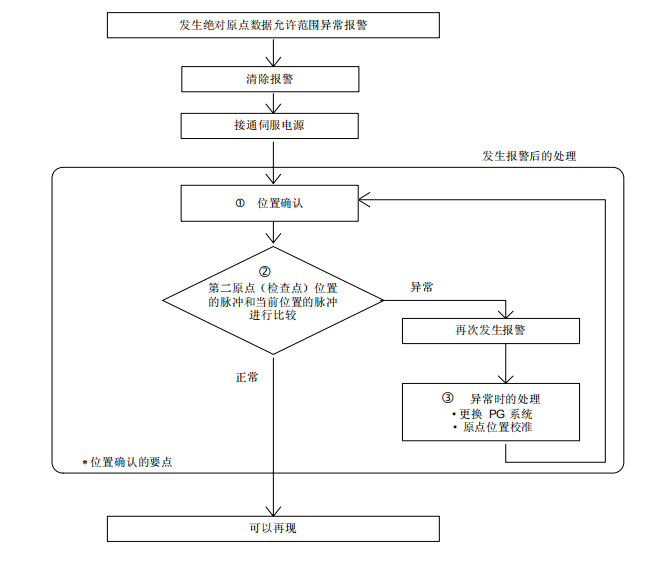
c 原点位置检查
绝对原点数据准许范围异常发生报警后,利用操作轴,可以移动到第二原点位置,进行位置确认操作。如不进行位置确认的操作,就不能进行再现,试运行及前进等操作。
d 脉冲差检查
第二原点位置的脉冲和当前位置的脉冲相比较,如脉冲差在准许范围内,便可以进行再现操作,如超过准许范围,则再次报警。
• 准许范围脉冲,是 PPR 数据 (电机转 1 周脉冲数)。
• 第二原点位置的初始值是原点位置 (全轴在 0 脉冲的位置),但其可以变更,请参照“6.4.2 设定第二原点位置的方法”。
e 报警
再次发生报警时,可认为 PG 系统异常,请检查。处理完异常轴后,恢复到轴的原点位置,再次进行位置确认

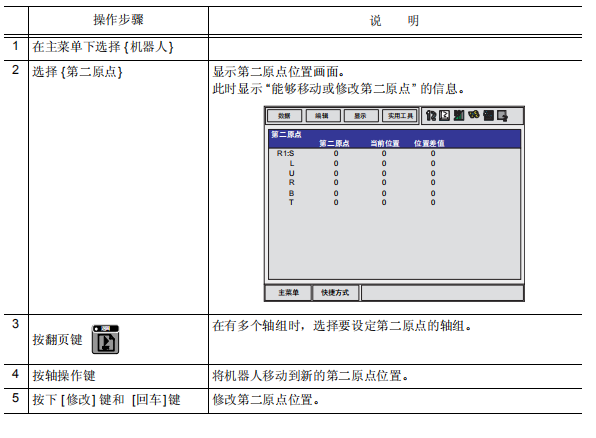
6.4.2 设定第二原点位置的方法 ( 确认点 )
第二原点位置与机器人固有的原点位置不同,它是作为绝对原点数据的检查点而设定的位置,设定第二原点位置按下列操作顺序进行。
一台控制柜控制几台机器人和工装轴时,每台机器人或每台工装轴都必须设定第二原点位置。
报错代码
安川
安川机器人
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-27 07:10:03
- 2022-11-01 14:27:03
- 2022-11-09 07:05:05
- 2022-11-09 09:58:04
- 2022-12-26 10:00:03
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









