





焊接机器人的视觉系统标定方法研究手眼标定

关于焊接机器人的视觉系统标定方法研究手眼标定,手眼标定故名思意,为了达成执行机构到达空间对应位置,当双目视觉系统固连在机械手末端执行机构上的时候,在已经知道通过双目标定得到空间特征点三维坐标到图像平面坐标的转换关系后,还需要知道视觉系统与执行机构的位姿关系,视觉系统就是“眼”末端执行机构就是“手”,求它们之间的位姿关系就是双目标定。
.jpg)
如图3-22所示,Cw为世界坐标系,Cc为相机坐标系,Ce为与相机固连的机器人末端坐标系。通过本章节之间的方法,可以测得Cc与Cw的位姿转换关系,这里我们用Ra,ta来分别表示Cc相对于Cw的旋转和平移关系,因为机械手执行任务时,完成任务的主体是末端执行机构,所以视觉系统获取的空间坐标应该转换到机械手的末端执行机构下的坐标系才可以正常运行,因此我们了解Ce相对于Cc的旋转和平移关系Rb、tb是得到Ce与Cw的位姿转换关系的前提,手眼标定的任务也就是求解Rb、tb。
现在首先机械末端执行器在P1位置,后来移动至P2,在P1时对相机C进行标定,此时相机坐标系为Cc1可以得到外参矩阵![]() ,同样在P2时相机C进行标定,此时相机坐标系为Cc2可以得到外参矩阵
,同样在P2时相机C进行标定,此时相机坐标系为Cc2可以得到外参矩阵![]() ,则从Cc1到Cc2的位姿变换矩阵为
,则从Cc1到Cc2的位姿变换矩阵为![]() 。又从Ce1到Ce2的位姿变换是机械手的移动,可以从机械手的运动控制劳置中直接读取该数值D。我们要进行手眼标定的为相机和机械手末端执行机构的位姿关系为x,且Ce1到Cc2与Cc2到Ce2的位置关系由于固连所以是不变的。通过上述分析可以得到下式:
。又从Ce1到Ce2的位姿变换是机械手的移动,可以从机械手的运动控制劳置中直接读取该数值D。我们要进行手眼标定的为相机和机械手末端执行机构的位姿关系为x,且Ce1到Cc2与Cc2到Ce2的位置关系由于固连所以是不变的。通过上述分析可以得到下式:
![]()
对于通过上式求解Rb , tb , Tsai等人在二十世纪80年代就提出了解法。要求得Rb、tb,需要机械手末端执行机构运动两次,即在原先的基础上多Cc3和Ce3,为P2运动到P3时,手眼在P3时各自的坐标系。这样才可以有足够多的方程组来求解未知数。

通过图3-23,可以得到以下4个关系式:

通过上述4个方程可以联立求解Rb、tb,且若C为单位矩阵或者C的旋转角为0°或180°时则会出现多解现象,应该予以剔除,重现选取位姿。下面利用MATLAB进行手眼标定的编程,求解流程如下:
.jpg)
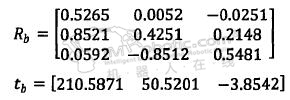
焊接机器人则根据三次双目标定求解得到的A, B, C求解得到C1, C2,和两次对应的末端执行机构的变换矩阵,可得手眼标定的结果为:

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









