





焊接机器人焊缝特征提取和模式识别 上

焊接机器人焊缝特征提取和模式识别
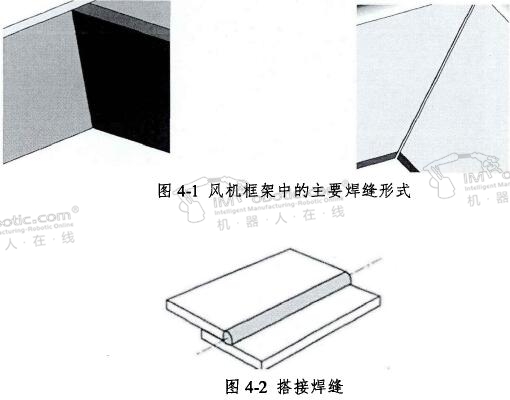
在经过视觉系统搭建和相机标定之后,后续步骤就是图像采集和图像处理。由于本实验系统针对的是台州某公司的风机框架底座的焊接项目,焊接过程主要针对如下所示的T型焊接和对接,其中为了增加本实验系统的适用性,再多讨论一种常见焊缝搭接焊缝。
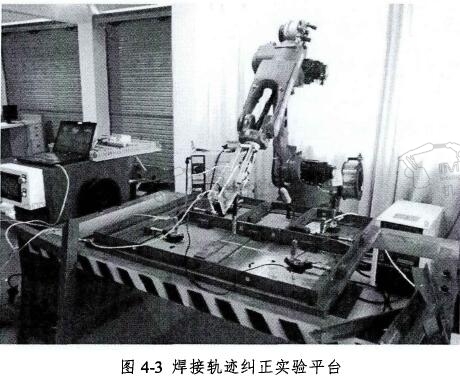
之后通过搭建好的如图4-3所示的实验平台进行数据图像的采集,该实验平台包括机械手主体、机器人控制器和与之配套的示教器、与机器人末端执行机构固连的呈一定位姿的带有线激光发生器的双目视觉系统、图像处理设备PC、实现PC和机器人控制器数据中转的PLC、待焊接的风机框架底座零件、焊接回转台以及针对该风机框架的焊接装配平台。在本项目中,首先将加工出来的风机框架零部件按预先规划安装在焊接装配平台上并通过装配平台上的夹具进行定位,之后通过示教器对风机框架上的待焊接的焊缝进行焊接示教,当示教完毕后,机械手便可以多次再现示教的焊接轨迹。双目视觉系统固连在机械手焊枪上进行图像的采集,相机采集的图像经由USB在PC上实时计算,由于PC和机器人控制器直接进行数据交互的设备较为昂贵且本项目中PC与机器人控制器交互的数据较为简单,所以PC上计算出的图像的数据通过MODBUS协议与PLC进行通信,再通过PLC与机器人控制器进行数据交换。
焊缝图像预处理
通过实验平台,可以获取三种项目中出现的典型焊缝,分别用双目采集多张线结构光照下的焊缝图片,又由于本章的主要任务是在相机采集到焊缝图片后,对焊缝种类进行分选,从而可以用相应的特征点提取算法来提取焊缝点,所以只需要对一个相机采集到的图片进行处理即可。
焊缝图像去噪
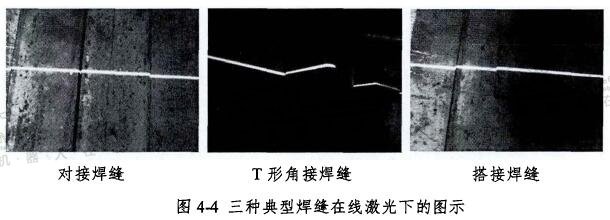
相机在获取图片后,由于图像信息在获取、传输过程中会存在一些外界光照环境、内部的元件灵敏度等内外干扰,会使图像存在着一些噪声,对图像质量产生影响,模糊图像进而使图像特征变得相对难以提取,对后续可能要进行的图像分析产生一定影响。图像中存在的噪声主要分为加性噪声和乘性噪声,加性噪声是与图像信号不相干的,信号有无对噪声无影响,而乘性噪声则是与信号相互依存的。而对这些噪音的去除也可以分为两类:一种为空问域的平滑,基于噪声种类的不同,利用不同的平滑模板对噪声源图像进行卷积运算,其中平滑模板根据模板中的元素可分为线性与非线性模板,来减少和抑制图像噪声;一种为频率域的滤波,通过对图像进行傅里叶变换,将图像从空间域变换到频率域,由于图像频率域频谱中,低频对应图像的平滑区域而高频对应着图像的细节部分如噪声边缘等,所以可以通过低通或带通滤波器进行滤波,再进行频率域到空间域的反变换即可达到减小噪声的效果。如下图4}所示,从采集到双目焊缝图片抽取单目拍摄的对应三种焊缝的图片。
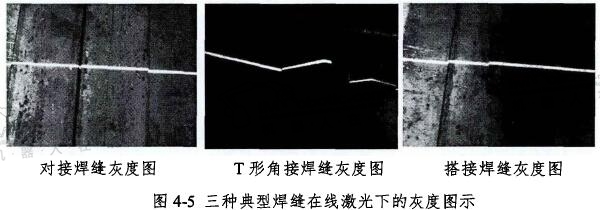
本项目对图像进行平滑处理,不仅是为了去除噪音,同样是为了减少线激光图像以外的图像背景灰度跳变的区域,这样再进行后续的激光线条获取的时候,可以较完整的获取激光线条且同样可以减少获取图像背景中其他元素。对图像进行平滑,首先将三张图片导入MATLAB中,利用imread函数。在对图像进行平滑处理之前,因为本项目主要是对激光样条进行图像处理,所以可以先对图像进行灰度转换,如图4-5所示。
焊接机器人
之后分别对图像进行线性的高斯平滑和非线性的中值滤波,进行图像去噪后的图像对比。其中高斯滤波是首先生成一个高斯模板,在该模板中越靠近中心点权重越大,越偏离中心点权重越小,这样在进行平滑的时候,会减小平滑处理过程中产生的图像模糊,同时这种模板特性类似于二维高斯函数,所以我们可以利用高斯函数的参数套入该模板中,同时选用不同的![]() 以及不同大小的模板来形成不同的高斯模板进行针对性的平滑去噪。而中值滤波是一种基于统计学中排序思想的一种平滑方式,同样也是设计一个中值八邻域模板,取该模板的中心为运动点,将该模板与图像做卷积计算,该模板的中心点对应着图像上的元素点,对于图像上的任意一点,中值滤波就是将以该点为中心的八邻域模板内的图像像素点进行统计排序选择中值来替代图像上被选择的任意点,可以用不同大小的模板来形成不同效果的平滑去噪。
以及不同大小的模板来形成不同的高斯模板进行针对性的平滑去噪。而中值滤波是一种基于统计学中排序思想的一种平滑方式,同样也是设计一个中值八邻域模板,取该模板的中心为运动点,将该模板与图像做卷积计算,该模板的中心点对应着图像上的元素点,对于图像上的任意一点,中值滤波就是将以该点为中心的八邻域模板内的图像像素点进行统计排序选择中值来替代图像上被选择的任意点,可以用不同大小的模板来形成不同效果的平滑去噪。

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









