





焊接机器人过路径点的三次多项式插值
时间:2017-06-30
阅读:12167
原创

焊接机器人过路径点的三次多项式插值
通常情况下,如果关节在经过路径点时停留(角速度为0)可以用上述的三次多项式插值法计算,当关节经过路径点不停留就不能用式(6-6)来进行路径规划了。在这里根据过路径点的情况对以上算法进行修正,而在路径点上的角速度可以根据工作情况的需要来设定。则机械臂在起始点和终止点角速度约束条件为:

而其它的约束条件不变,如式(6-1),( 6-3 ),( 6-4)所示,可以得到如下方程:

而路径点的角速度可以由以下两种方法求得:(1)由笛卡尔坐标系下经过路径点的瞬时线速度来计算。(2)在关节空间中,可以对机器人系统采用启发性方法,使机器人自己选择相应的角速度。
若在关节起始点和终止间中间插入路径点V, V点的关节角度为θv,机械臂关节经过V点时不停留,设从θo到θv和从θv到θf插值的三次多项式分别为:

设这两个区间段时间范围分别是(0-tf1)和(0-tf2)则可以得到:
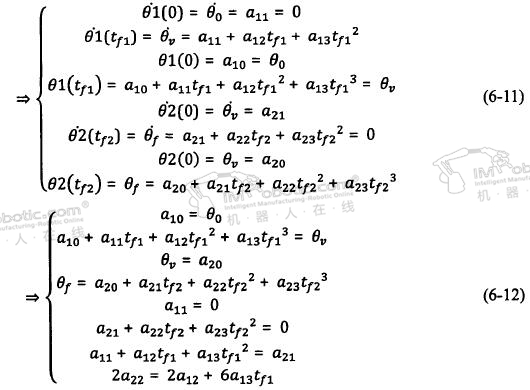
式(6-12)为含有两个常数tf1,tf2和8个未知数a10,a11,a12,a13,a20,a21, a22,a23的方程组,若选择路径点V时给定约束条件:
![]()
则可以解出未知参数a10,a11,a12,a13,a20,a21, a22,a23:
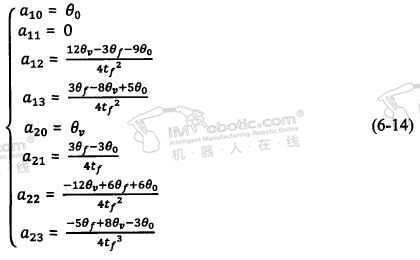
焊接机器人即可以求出插值的两个三次多项式函数,因此当关节通过不停留的路径点时,可以用前后两个三次多项式路径函数进行组合,实现路径规划。
焊接机器人
基于双目视觉的立体曲面焊接机器人测控关键技术研究
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









