





焊接机器人结构优化平衡缸数学模型的建立

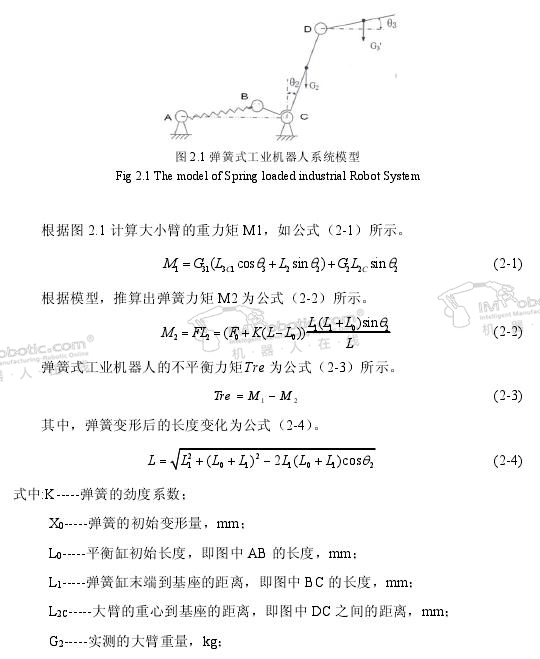
本文中工业机器人原型是六自由度的机械手。在研究机械手时,将机器人现进行数学建模。对于工业机器人实际工作需要,其工作平面为二维平面即可。由于腕部质量比较小,在计算重力力矩时,可以忽略。将平衡缸内的弹簧简化,机器人初数学模型简图如图2.1所示。弹簧系统的力矩主要来自两方面,一是大臂和小臂等重力所产生得力矩,二是弹簧的弹簧力所产生力矩。
2.3工业机器人平衡缸优化模型建立
2.3.1设计变量的确定
本文要研究的问题是使弹簧力矩与重力矩相等,即在运动过程中,力矩应处处尽量相等。设计的难点是如何保证力矩之差具有稳定性。力矩稳定后,在选择大臂底端轴C的电机时,要求就会降低。因此选择平衡缸固定支点A到连接点回转中心B的距离L0、大臂底端轴中心C到与平衡缸连接点回转中心B的距离L1,弹簧的劲度系数K、弹簧的初始变形量X0作为优化变量,即:

结合165kg工业机器人进行实验优化,并对其进行测量,作为优化的初始值:
.jpg)
2.3.2目标函数的建立
由于弹簧缸的结构可知,根据公式(2-1) , (2-2)和(2-3)可知,弹簧的伸缩变化只与大臂转角![]() 有关,分析发现小臂姿态的选取对不平衡力矩
有关,分析发现小臂姿态的选取对不平衡力矩![]() 。有一定的影响:小臂姿态保持垂直时得到的最大不平衡力矩和大小臂全姿态得出的最大不平衡力矩总相差一个常数,这个常数正是大臂在极限位置时小臂从水平变到竖直时小臂对Ⅱ轴(C点)产生的力矩变化值。由研究发现:这个常数力矩是且轴电动机必须克服的扭矩之一,此时小臂 为竖直状态,即
。有一定的影响:小臂姿态保持垂直时得到的最大不平衡力矩和大小臂全姿态得出的最大不平衡力矩总相差一个常数,这个常数正是大臂在极限位置时小臂从水平变到竖直时小臂对Ⅱ轴(C点)产生的力矩变化值。由研究发现:这个常数力矩是且轴电动机必须克服的扭矩之一,此时小臂 为竖直状态,即![]()
本文设计的目标函数主要考虑两方面的内容,一是不平衡力矩最小,二是工业机器人的运动具有稳定性,表现在不平衡力矩上面,就是不平衡力矩的波动性比较小。设有:
![]() 其中,
其中,![]() 分别为不平衡力矩的最大值与最小值,
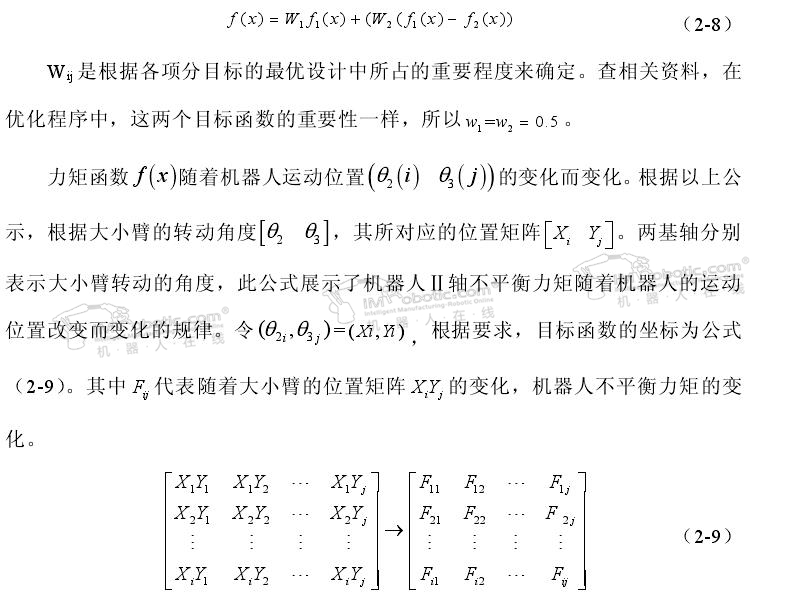
分别为不平衡力矩的最大值与最小值,![]() 是加权因子;先求出各项分目标函数的最优值,再根据多目标优化设计的总体要求选取合适的加权系数,则有:
是加权因子;先求出各项分目标函数的最优值,再根据多目标优化设计的总体要求选取合适的加权系数,则有:

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









