





马鞍型焊缝专用焊接机器人各机构设计
时间:2017-11-02
阅读:8442


马鞍型焊缝专用焊接机器人各机构设计
卡紧机构结构设计
如图4.2所示为焊接机器人的卡紧机构的三维造型图,该卡紧机构可以实现管径为304mm~600mm的装夹。该卡紧机构主要由腰部齿轮、基座、支撑杆、支撑杆滑动套筒、十字水平连杆、传动丝杆、电机支撑座、步进电机、联轴器等组成。该机构由空间均布的四个铰链机构组成,电机通过联轴器带动丝杆旋转,十字水平连杆的中心孔加工有内螺纹,丝杆通过螺旋副实现十字水平连杆的竖直方向移动,十字水平连杆末端通过铰链与支撑杆滑动套筒连接,支撑杆末端外层包覆有防滑橡胶材料,支撑杆滑动套筒与支撑杆通过移动副连接,支撑杆太端通过铰链与基库连接,其总体尺寸为437mm×437mm×421mm,
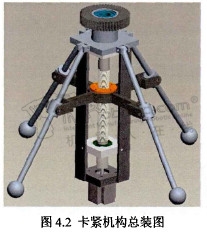
电机支撑座通过螺栓连接与基座连接,支撑座底板安装电机,卡紧机构安装在支管内部,充分利用了支管的内部空间。
如图4.3所示为十字水平连杆其由4个连杆组成,连杆末端加工有铰链孔,中心转配有丝杆螺母,其总体尺寸为270mm×270mm×20mm。

如图4.4所示为支撑杆组合,支撑杆的长度为310mm,支撑杆与直线轴承装配,支撑杆套筒两侧装有内径为10mm滚动轴承,滚动轴承通过与十字水平连杆末端的铰链孔以插销连接。
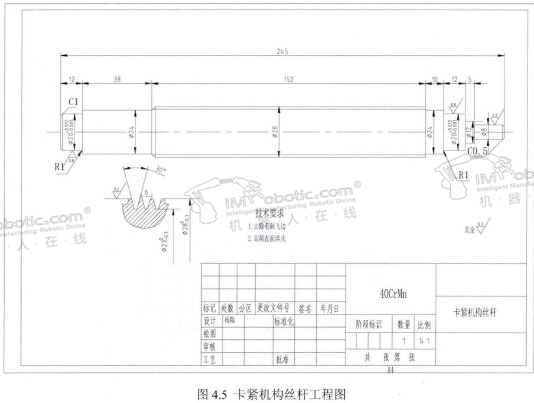
卡紧机构丝杆工程图如图4. 5
十字移动机构结构设计
如图4.6所示,十字移动机构为两个互相垂直安装的丝杆传动装置组成,电机输出轴与丝杆通过联轴器连接,丝杆通过螺旋副带动滑块移动,滑块上安装焊接手腕,实现焊枪手腕的竖直和水平方向的移动,该十字移动机构竖直方向和水平方向丝杆均能实现行程为300mm的直线方向调节。
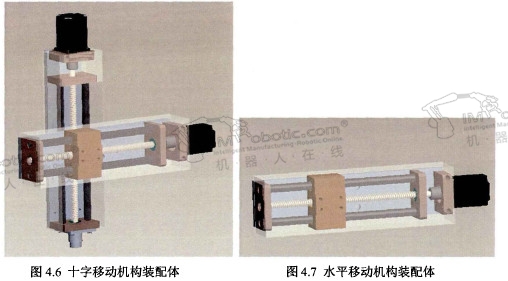
如图4.7所示为水平移动机构,该移动机构由丝杆、两根圆管导轨、移动滑块、底板、支撑板、电机、联轴器等组成,其总体尺寸为76mm×90mm×460mm。

如图4.8所示移动机构的滑块装配图,滑块加工有三个圆孔,圆孔内分别装有丝杆螺母和直线轴承,其总体尺寸为57mm ×60mm×460mm。
手腕结构设计
如图4.9所示为机器人手腕,该机器人手腕主要由两个互相垂直安装的弧形齿轮、焊枪、伺服电机等组成,其中调节焊枪工作角和行走角的弧形齿条的圆心重合,这样就能实现焊枪调节角度的过程中焊枪端点不动的定心功能,该手腕的总体尺寸为260mm× 200mm×660mm。

如图4.10所示为焊枪手腕行走角控制组合,该结构主要由一个分度圆直径600mm的,空间角度为70“的圆弧齿条组成,圆弧齿条两侧加工有圆弧凸起,两侧固定板加工有和弧形齿轮尺寸相同的圆弧凹槽,通过弧形齿轮两侧凸起和固定板两侧的凹槽装配,一侧固定板上装有齿轮,齿轮轴另一侧装有锥形齿轮,伺服电机输出轴上安装有另一个锥齿轮,伺服电机通过锥齿轮啮合实现交错轴运动的传递至齿轮,最终通过齿轮和弧形齿条的啮合带动弧形齿条沿着弧形凹槽转动从而实现焊枪行走角的调节。
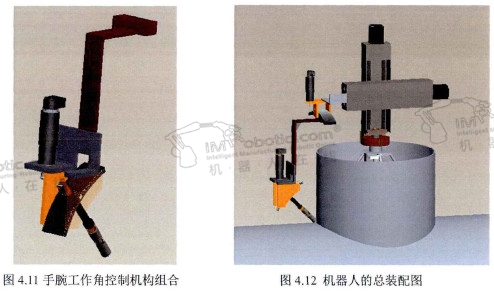
如图4. 11所示为手腕工作角控制机构组合,该工作角控制机构主要由弧形齿条、齿轮、一对啮合的锥齿轮、伺服电机、弧形齿条固定板、电机基座等组成。该工作角调节弧形齿轮的结构和组装原理同手腕行走角控制机构相似,采用分度圆直径为400mm,角度为50°的弧形齿条实现焊枪工作角的调节,焊枪安装在弧形齿条的中心轴线上,并且使得行焊枪端点和弧形齿条的圆心重合。
机器人的总装配体
在Pro/E中将机器人设计好的各个部分进行装配,其模型如图4.12所示
通过对焊接机器人各个模块的工作尺寸进行分析,得出相应的结构尺寸。合理选择电机和传动结构,最后通过三维造型设计,得到卡紧机构、十字移动机构、手腕机构等,并装配完成该马鞍型焊缝焊接机器人的结构设计。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









