





焊接机器人双目视觉系统标定摄像机参数计算
时间:2017-11-29
阅读:8380

焊接机器人双目视觉系统标定摄像机参数计算
标定是提高系统精度的关键一步,是视觉伺服控制中不可缺少的重要环节。图像中一个像素坐标位置与实际空间中的某一点存在一一对应的关系,而这种关系正是由摄像机成像模型来参数决定的,成像模型的参数需要通过视觉系统标定确定,因此,视觉系统标定是实现图像二维空间到三维空间的关键步骤。本论文将Bumblebee2双目摄像头安装在焊接机器人末端形成双目立体视觉系统。摄像头的位姿会随焊枪末端运动而变化,因此对摄像头与机器末端的位置参数(手眼标定)是非常必要的。本章给出了视觉系统标定的原理和过程。
摄像机标定
CCD ( Charge-Coupled Device)又称电荷藕合器是使用最广的摄像设备,这是因为它具有精度高、寿命长、噪音低、灵敏度高等优点,因此本论文采用的是Bumblebee2双目CCD摄像机作为视觉系统的摄像机。
摄像机模型和标定参数
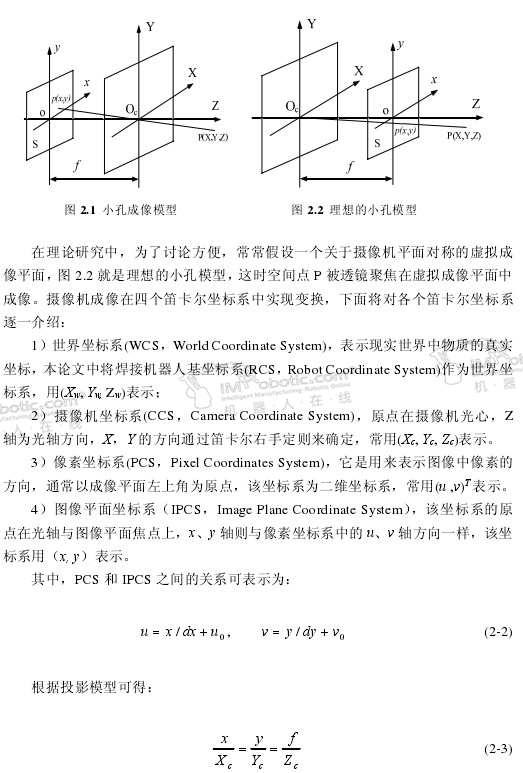
摄像机成像常用的几何成像模型有三种,其中应用最多的是透射投影模型,针孔模型(图2.1)就是典型的透射投影。图2.2是理想的针孔成像模型,大多数情况下,摄像机的成像模型必须符合透镜成像规律:

其中,u为物距,v为像距,f为透镜的焦距。通常,令v≈f,这时无畸变的理想针孔模型可以用来表示摄像机模型。在理想的针孔成像模型中,三维空间中某点的图像经过主点的光线与摄像机成像平面的相交,在摄像机成像平面上就产生了该点的图像。
其中f为焦心到图像平面的距离,即焦距。
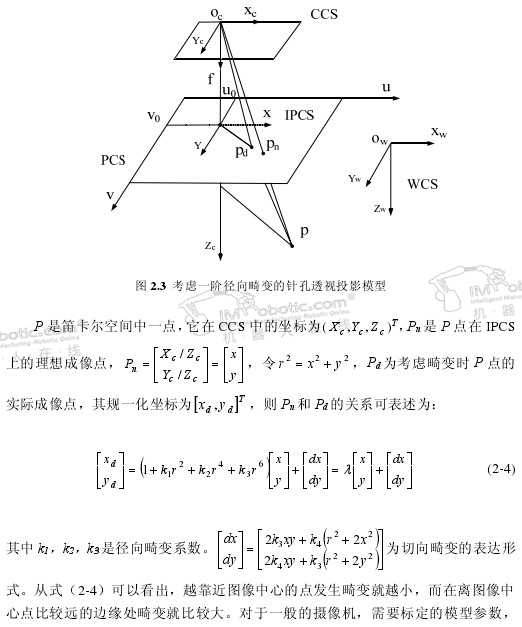
由于摄像机在成像过程中会产生畸变,所以在建立模型的时,必须考虑畸变对成像质量的影响。经常考虑的图像畸变有径向畸变、切向畸变、偏心畸变等,对视觉精度影响最大的是径向畸变。畸变常常分为线性和非线性,非线性畸变可以更精准的减小畸变,但其在计算中会产生过多的非线性参数,这样常常会导致奇异解的出现,使精度提高收到限制。因此,通常只考虑一阶径向畸变就能达到很好的效果。一阶径向畸变成像模型如图2.3所示。
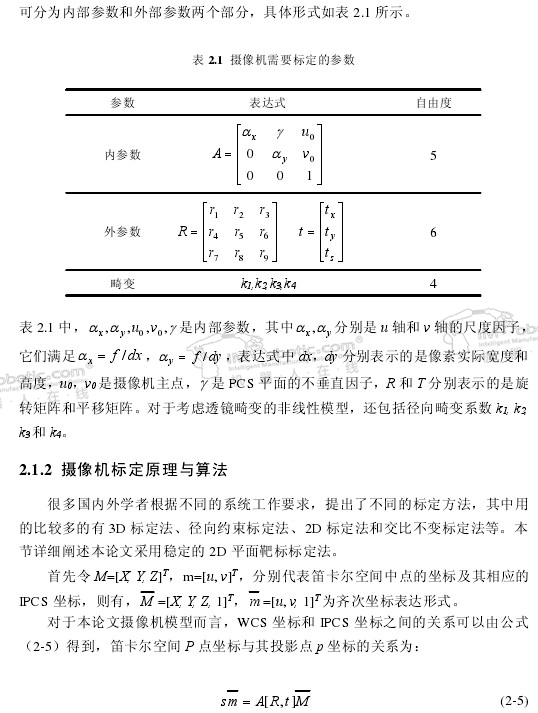

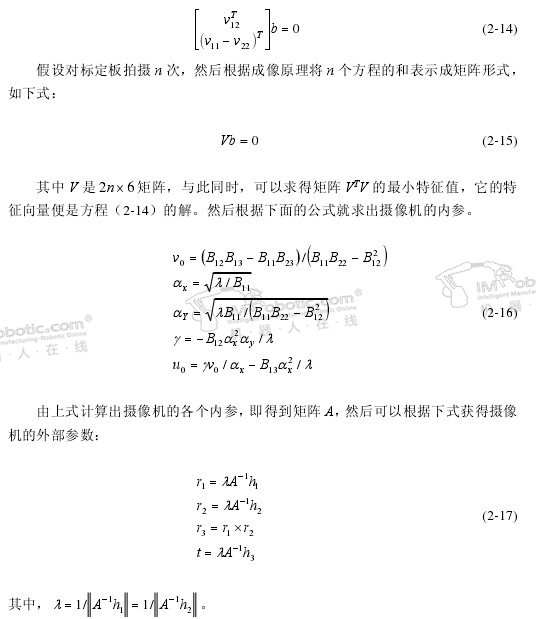
至此,所有的摄像机内部和外部参数都已经解出了,需要注意的是这些参数的计算都不考虑畸变情况,所以必须将这些参数代入畸变模型中,才可以得到畸变下的摄像机内参和外参。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









