





焊接机器人手眼关系标定
时间:2017-11-29
阅读:8014

焊接机器人手眼关系标定
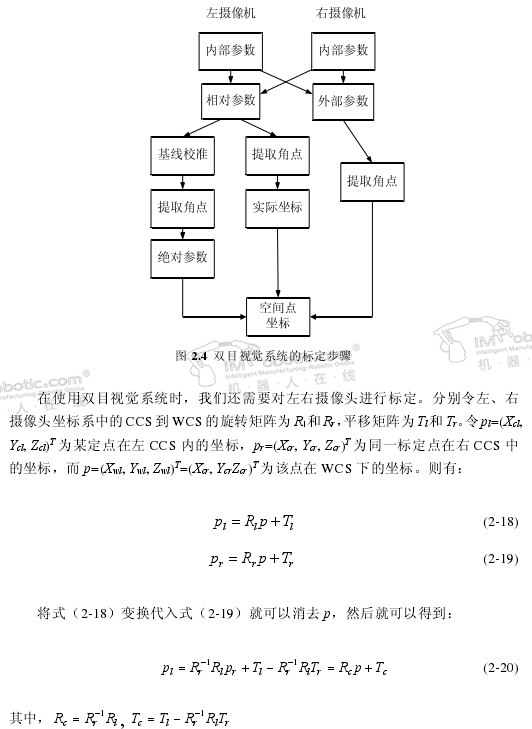
对摄像机标定原理和标定方法了解后,那么下一步就是对双目视觉系统标定了。图2.4是双目视觉系统标定的步骤。对单目摄像机标定的技术经过四十多年的

焊接机器人手眼关系标定
在焊接过程中,焊工主要是运用双眼来判断待焊焊件的位置,同时通过视觉系统估计焊件的位置以及人手相对于焊件的位置。从而可以顺利地完成焊接任务。根据焊工的焊接过程,本论文把双目摄像机安装在焊接机器人的末端连杆上,随着焊枪的运动而运动。要准确的估计焊件的空间位置,就必须对标定由双目摄像机和末端连杆组成的手眼系统。下面介绍手眼标定原理和步骤。
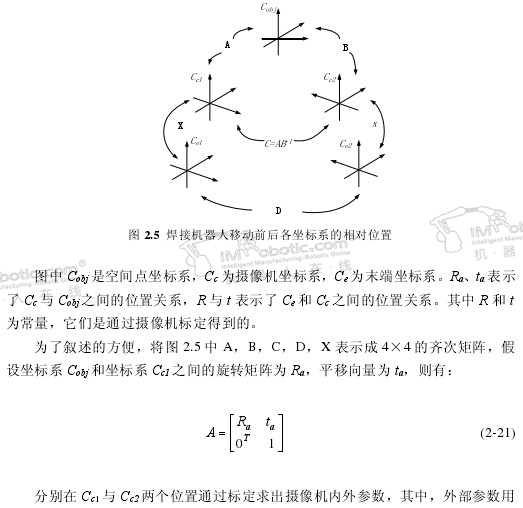
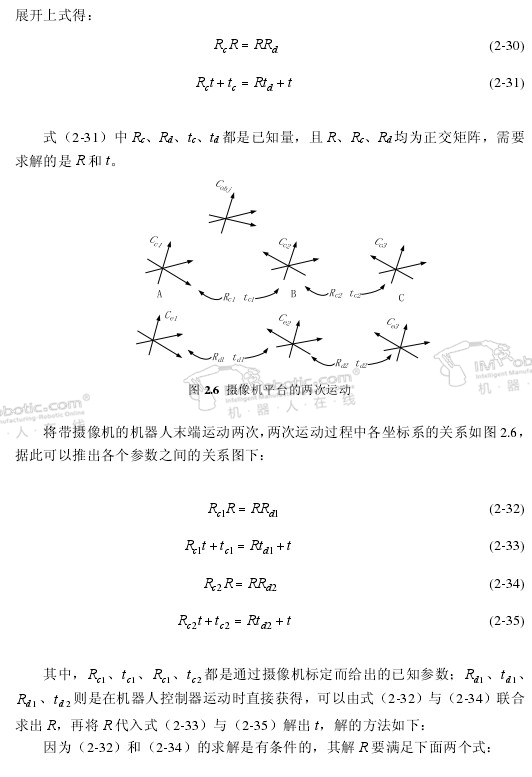
手眼标定的常用原理是让机器人末端的摄像机在不同的位置采集同一标定参考物,据此得到末端的旋转分量和平移分量与不同位置采集的信息的关系。图2.5为机器人移动摄像机采集数据时不同位置的坐标系。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









