




焊接机器人双目视觉系统标定试验
时间:2017-11-29
阅读:6717

焊接机器人双目视觉系统标定试验
本论文使用的双目成像系统采用加拿大Point Grey公司研发的Bumblebee2双目摄像机。标定模板采用自制经典的棋盘格模板,整个模板由9×13个黑白块组成,每个块大小20 X 20mm,如图2.7所示。
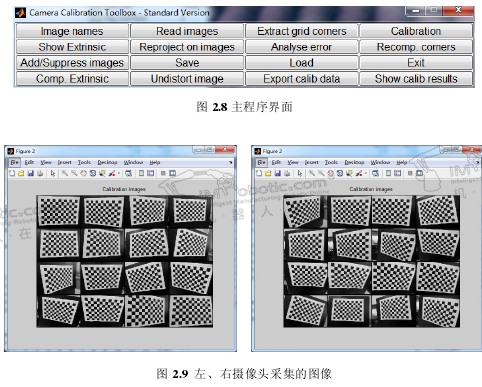
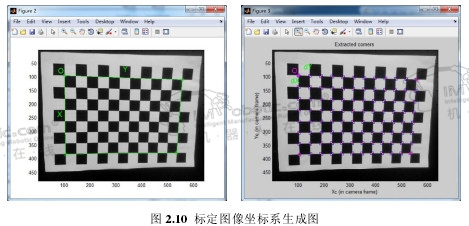
利用棋盘模板,分别用摄像机拍摄摆放角度不同的棋盘格,通过MATLAB标定工具箱进行摄像机标定计算。该标定工具箱在标定过程中需要手动选择角点进行定位,存在一定的误差,同时还容易出现手误,致使标定过程需要重新开始,针对这种情况,将经优化的角点提取算法加入到Extract grid corners函数中,使标定过程中自动提取角点,减小标定时的不必要误差,同时提高标定速度。如图2.8为标定程序主界面,图2.9和图2.10为标定主要过程。
标定试验过程如下:
1)分别用左、右摄像头对不同摆放角度的标定模板进行拍摄,左、右摄像头各拍16组标定板图片。
2)将标定工具箱文件夹放到MATLAB工作路径下,并运行主函数calib_gui调用标定程序,运行后程序主界面如图2.8 0
3)运行Read Images读取步骤1采集的标定模板图片,如图2.9。
4)提取角点,根据灰度值的变化情况在其领域内搜索精确的坐标值,选定坐标系原点。
5)分析各个标定板图片中的坐标值,基于此运行程序计算摄像机的内部参数。
6)运行m文件stereo_gui,将已标定摄像机的内参导入,进一步计算摄像机外部参数。
针对Bumblebee2双目摄像机,其标定结果如下:
左摄像机内部参数:
焦距:fc_ left=[509.58892, 503.02896]
主点坐标:cc_ left=[317.00521, 249.69552]
坐标轴夹角:angle of pixel axes=89.92256 degrees
畸变系数:kc_ left=[-0.16528,0.18006,-0.00176,0.00048]
右摄像机内部参数
焦距:fc_ right=[509.52551, 502.82896]
主点坐标:cc_ right=[315.99581, 243.39564]
坐标轴夹角:angle of pixel axes=89.88685
畸变系数:kc_ right=[-0.14844,0.14266,-0.00090,0.00065]
摄像机外部参数:

摄像机定标搭建了焊缝从三维空间WCS到成像平面二维IPCs的桥梁。标定精度是决定视觉伺服控制系统精度的关键因素之一。因此,视觉系统的标定是视觉伺服控制系统中不可缺少的一个重要步骤。本章针对摄像机标定主要做了一下
工作:
1)分析视觉系统常用的ccD摄像机成像原理和标定方法,并结合Bumblebee2摄像机的参数介绍了摄像机参数的标定过程;
2)在畸变校正的小孔模型下,采用经典成熟的标定方法进行了摄像机内部和外部参数的标定。同时给出了视觉系统中手眼的标定;
3)在Matlab标定工具箱基础上,改进了标定程序,使其具有快速性、准确性和可靠性等优点。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









