




【发那科】发那科机器人Error Code Output Function错误代码输出功能

今天介绍发那科机器人错误代码输出功能:
Error Code Output Function
机器人要求
该功能需要安装软件选项包J527,以及I/O扩展板。需要配置信号通信模块,点数要求33点输出1点输入。
主要功能
此功能可以输出除了Warn级别以外的机器人所产生的报警内容。
相关手册
本软件是基于手册FANUC R- 30iB Controller Option Function Operator’s
Manual (B-83284EN-2)第20章Error Code Output功能的说明。
功能设定步骤
使用此功能涉及到二个系统变量。$ER_OUT_PUT.$OUT_NUM和$ER_OUT_PUT.$IN_NUM。
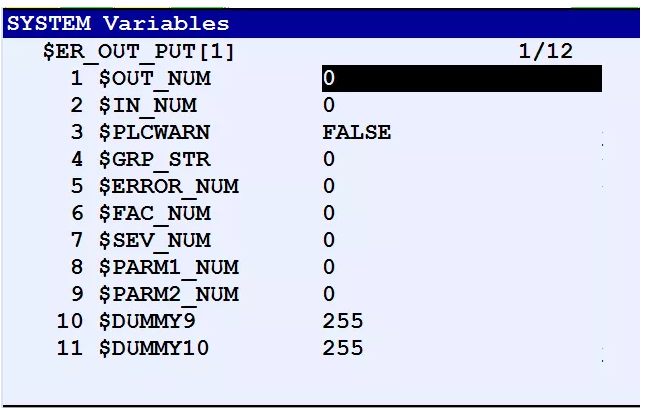
Error Code 变量
若$ER_OUT_PUT.$OUT_NUM设置为0,则Error Code Output Function关闭。
若$ER_OUT_PUT.$OUT_NUM设置为1,则启用Error Code Output Function。DO配置33个点,这33个点的分配如下表所示。

DO分配情况
通常一个报警代码是由报警等级,报警的ID号和报警数字号构成。
如SVRO 002,报警等级是SERVO,报警的ID是“SRVO”,报警数字是2。对应的DO信号情况分别为报警等级列表、报警ID列表和报警数字列表中红色框所示。
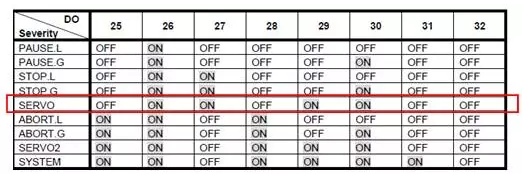
报警等级列表
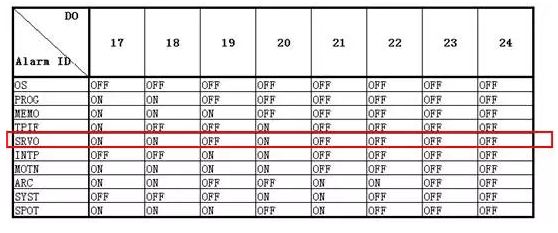
常用报警ID列表
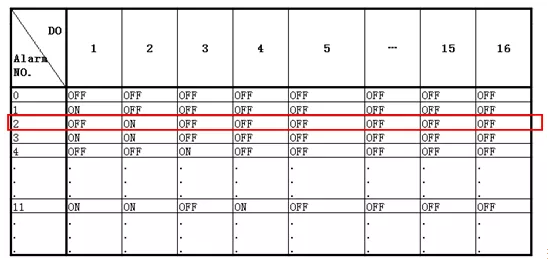
报警数字列表
$ER_OUT_PUT.$IN_NUM的设定值为确认哪个DI为Search signal,请求报警输出的更新。
监控时序步骤
通过Utilities 菜单进入Data Monitor Schedule 界面若报警仅有一个,监控时序如下:
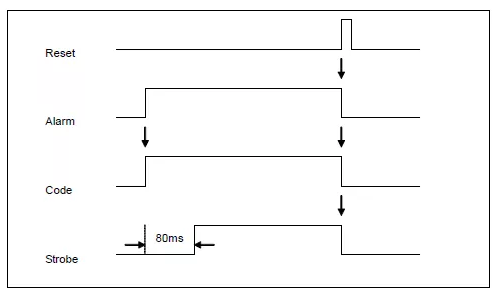
监控时序
若报警有多个(支持100个报警输出),监控时序如下:
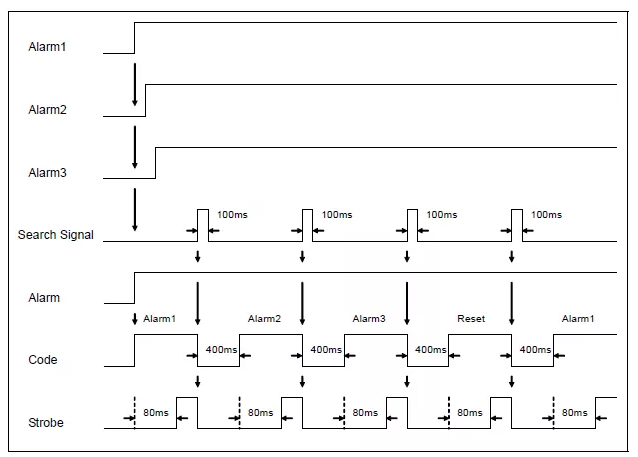
多报警监控时序
功能总结
该功能可以将机器人产生的报警以数字信号形式输出到外部设备。但WARN和NONE级别的报警不会被输出。
来源:智能方

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

上海发那科机器人有限公司
 7年
7年



- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2024-03-22 11:02:06
- 2022-10-30 17:21:05
- 2022-10-26 09:05:21
- 2022-11-08 14:18:04
- 2022-10-20 08:12:02
- 2022-08-03 10:20:40
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









